A catamaran’s owner has decided to adapt my design to his
boat, which is sailed on a large freshwater lake. As the lake’s currents are
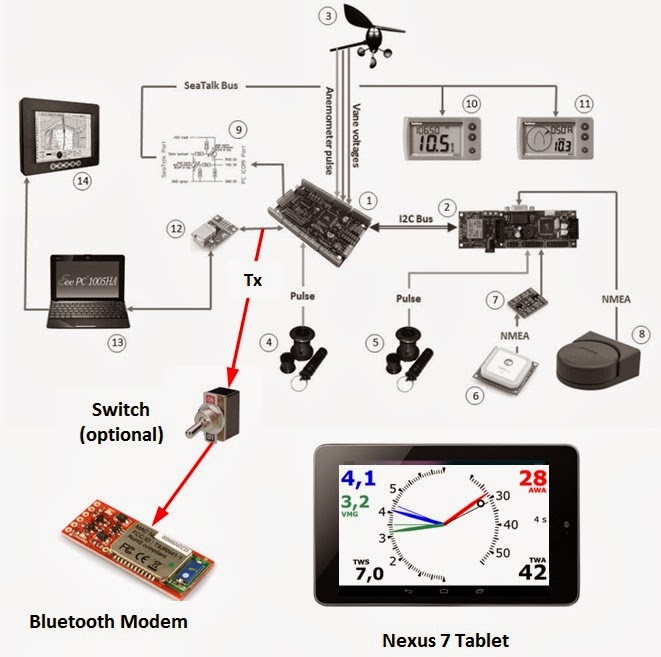
virtually negligible, the boat speed is measured from a GPS. Furthermore, for a
catamaran, there is no need to correct wind angle measurements for heel. No
electronic compass is planned for now. A Nexus tablet is used as display, with
a Bluetooth link to the system.
For a catamaran, as there is no heel, there is no way to calculate the leeway as we do for a keelboat using boat speed and heel (as described here). So the owner will have to make test runs and physically measure the leeway in different conditions, while logging boat speed, wind speed and apparent wind angle. It is expected that the leeway angle can be correlated to these 3 variables, and that correction curves can be developed and programmed in the microcontroller. For now, the leeway corrections will be neglected until test data are available.
For a catamaran, as there is no heel, there is no way to calculate the leeway as we do for a keelboat using boat speed and heel (as described here). So the owner will have to make test runs and physically measure the leeway in different conditions, while logging boat speed, wind speed and apparent wind angle. It is expected that the leeway angle can be correlated to these 3 variables, and that correction curves can be developed and programmed in the microcontroller. For now, the leeway corrections will be neglected until test data are available.

The microprocessor acquires or calculates the following data 10 times per second (10 Hz):
·
Apparent wind angle (AWA)
·
Apparent wind speed (AWS)
·
Boat speed through water (STW = GPS’s SOG)
·
True wind speed (TWS)
·
True wind angle (TWA)
·
Velocity Made Good (VMG)
· Leeway angle
· Heading ( = GPS's COG, when not corrected for leeway)
· Wind direction
· Leeway angle
· Heading ( = GPS's COG, when not corrected for leeway)
· Wind direction
These data are available through a serial link, going both to a Bluetooth modem and to serial-to-USB converter.
The Nexus tablet calculates running averages over an
adjustable range and refreshes a custom display 10 times per second.
A laptop can be connected to the system to view or change
calibration values, or to download live data for further analysis.
The system is now under construction and will soon be
installed. Software (both for the microprocessor and the Android tablet) is
also under development. The microprocessor code under development (in the WinAVR environment) can be found here. More detailed documentation will be added at the same location.