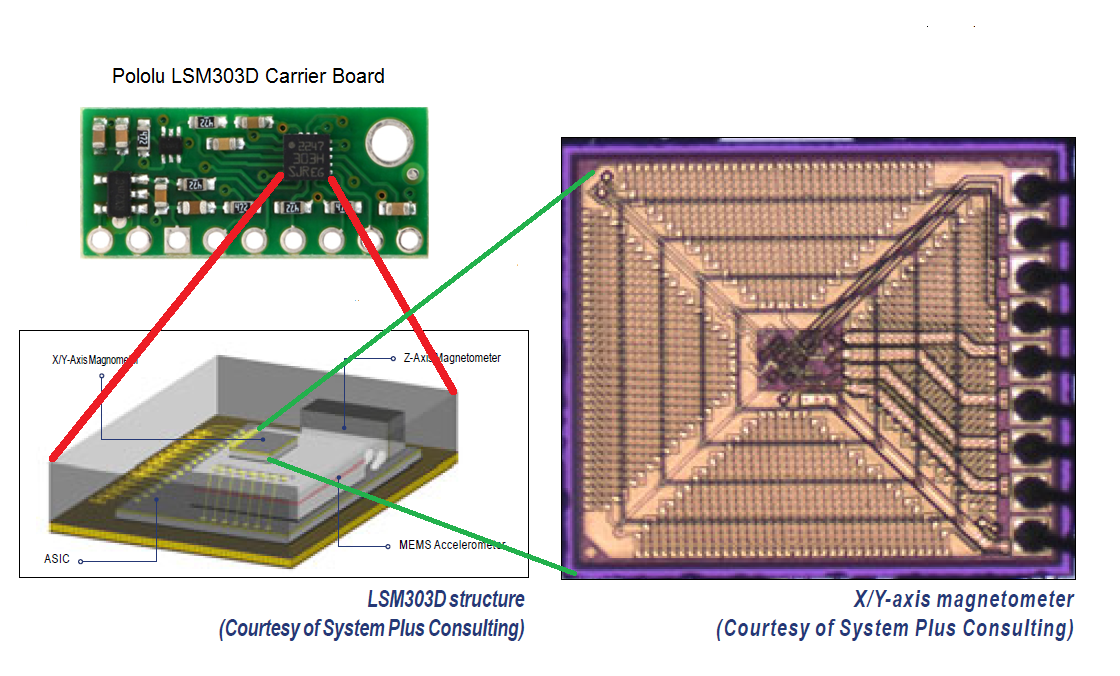
The LSM303D sensor is one of 2 magnetic sensors supported by the PX4 development team. The solution they have chosen to reduce the noise in the accelerometer outputs is to apply a low-pass software filter to the measurements, in addition to the hardware low-pass filter built into the chip. In this project, I have ported their LSM303D SPI driver and 2-pole software filter to the WinAVR environment.
I have also kept the strategy adopted for my Hi-Res compass, which is to use a higher sampling rate for the accelerometer, and take the average result in the calculation performed after each magnetometer measurement.
I have chosen a 6.25 Hz sampling rate for the LSM303D magnetometer, to insure that it will operate in its hi-resolution mode. The accelerometer sampling rate is set at 200 Hz, and the cut-off frequency of the software low-pass filter is set at 40 Hz.
Here is a general explanation of the code behaviour during normal operation.
The Pro Mini continually reads triple raw values (x,y,z) from the accelerometer. For each axis, it feeds the raw value to the software low-pass filter, which spits out a new filtered value for each axis. The filtered values are accumulated and counted.
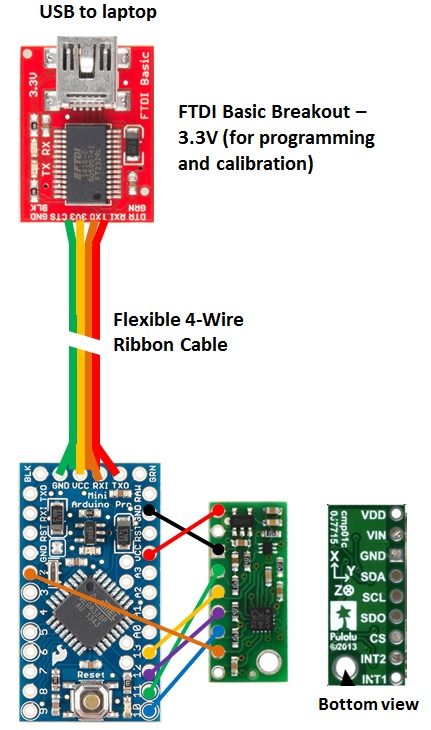
Each time the LSM303D magnetometer has a new set of 3 raw values available (x,y,z), it fires an interrupt on the Pro Mini. When this happens, the Pro Mini applies the calibration correction to the magnetometer values. It calculates the average of the accelerometer filtered values since the last interrupt, and applies the calibration correction. From this set of 6 values, it calculates the tilt-compensated heading, and the heel and pitch angles. It formats the results in 2 NMEA sentences that are sent to the serial port (115200 baud), 6.25 times per second.

The source code for the WinAVR environment can be found here. I am using Programmer’s Notepad to compile the code and program the Pro Mini through the Arduino bootloader.
This implies that the calibration factors have already been found since they appear as constants in the code. The software has other modes of operation useful for developing these calibration factors, which will be presented in Part 3 of this series.
A low-cost marine compass (Part 1 – Hardware
A low-cost marine compass (Part 3 - Calibration